De hoogste kwaliteit in combinatie met uitstekende prestaties heeft een naam: MOTOMAN
Montage
Overzicht
Montage en demontage met Motoman Robots
Industriële robots kunnen worden gebruikt om de taken te automatiseren die gepaard gaan met het samenstellen of demonteren van een product, zoals industriële of auto-onderdelen en machines, meubels of elektronische componenten. Robots kunnen een assemblagegereedschap (bijv. nutrunner) manipuleren of het werkstuk van/naar een stationair assemblagestation verplaatsen. In dit geval wordt gespecialiseerde grijpergereedschappen aan het uiteinde van de arm bevestigd om onderdelen en assemblages in verschillende fasen te manipuleren.
Wat is Robotic Assembly?
Assemblage (en demontage) is een gecoördineerde volgorde en combinatie van vele individuele bewerkingen, zoals onderdeelidentificatie, onderdeelsortering, scheiding, deeltoevoer, onderdeelbehandeling, onderdeelpositionering, grijpen, invoegen, bevestigen / verbinden, kwaliteitsinspectie en aanvullende up- en downstream-bewerkingen zoals reinigen, ontbramen, uitpakken, verzegelen, graveren, labelen .... en honderden meer! De robotcontroller bevindt zich midden in een communicatiestroom, ontvangt gegevens (deel-ID, taak-ID) of verzendt gegevens naar besturingstools, verzendt statusgegevens naar Line PLC's, MES-systemen of de cloud. Dit maakt robotassemblagetaken uitdagend - en echt interessant!
Design for Assembly
Op grond van de klassieke automatiseringsfilosofie is het altijd wenselijk de onderdelen zo goed mogelijk gesorteerd en gepositioneerd aan de robot aan te bieden, op een werkstukdrager, in een rooster, een rek, op een tray of op een geometrische laag. Opspanningen worden zowel gebruikt om de te assembleren onderdelen te presenteren als om de onderdelen in positie te houden/bevestigen/klemmen tijdens het meerstappen assemblageproces.
Flexibile Robotic Assembly
Maar de tijden zijn veranderd, en flexibiliteit is een van de robotgenen - gunstig voor de groeiende eisen van de hedendaagse flexibele automatisering. Tegenwoordig kunnen robots "zien" en "voelen", en geavanceerde logica verwerken en communiceren. Geavanceerde technologieën zoals machine vision, kracht-/torsiedetectie en communicatiemogelijkheden op apparaat-/cel-/lijn-/fabrieks- en cloudniveau zijn beschikbaar, waardoor robotassemblage veel flexibeler en veelzijdiger is in termen van werkstuk-/job-/werkstroomvariaties, in vergelijking met gekoppelde, aaneengeschakelde productiemachines.
Motoman Robot Models suited for Assembly/Disassembly
Motoman 6/7-Axis Handling Robots
Gewoonlijk bevelen wij het kleinere assortiment van onze Handling Robots aan, met name onze GP-serie 6-assige robots voor assemblagewerkzaamheden, samen met onze YRC1000 of YRC1000micro controllers. Ze zijn veelzijdig, bieden een hoge snelheid, een hoge positioneringsnauwkeurigheid en alle media-aanvoer- en connectiviteitsopties die u nodig hebt.
De bewegingsmogelijkheden van onze SIA-serie 7-assige robots zijn nog geavanceerder voor smalle ruimtes.
Onze HC10/HC20 cobots zijn een aantrekkelijke keuze wanneer het assemblageproces wordt gedeeld door een menselijke werknemer en de robot, zonder dat de robot om veiligheidsredenen moet worden omheind.
Een werknemer kan alle onderdelen en bevestigingsmiddelen vooraf in een armatuur laden, de cobot volgt en bevestigt de onderdelen, waarbij hij ervoor zorgt dat er geen schroeven of bouten ontbreken en dat deze met de juiste parameters en in de juiste volgorde worden bevestigd. Een begeleidingsfunctie voor de werknemer (displays, Guide-by-light, Augmented Reality) kan zorgen voor de juiste volgorde en kwaliteit van het resultaat van de gezamenlijke assemblage. Cobots zijn destijds een aantrekkelijke optie om handmatige assemblageoperaties te automatiseren - COVID-19 zal ons dwingen handmatige assemblagelijnen met arbeiders die één voor één in een lijn staan, op te heffen, of arbeidscapaciteit terug te brengen naar Europa.
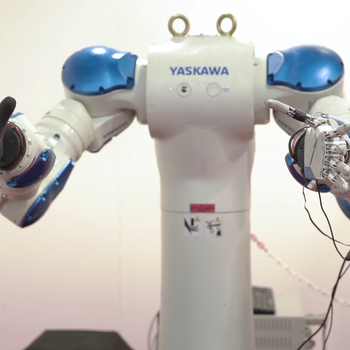
Onze SDA Series 15-Axis dual arm Robot models zijn de "koningen van de assemblage" - zij hebben een betere kinematische structuur dan mensen met twee volledig gecoördineerde handen, en kunnen complexe assemblagetaken uitvoeren met radicaal verminderde inspanningen die nodig zijn voor het ontwerp van gereedschappen, grijpers of opspanningen. Zij zijn perfect voor taken waarbij een beweeglijkheid en gecoördineerde beweging tussen twee handen vereist is (bv. buigbare onderdelen zoals kabels).
Het gebruik van een dubbelarmige robot om assemblagetaken te automatiseren is vrij eenvoudig - laat de robot het werk van een handarbeider kopiëren. Een succesvolle installatie van een SDA dubbelarmige robot begint echter vaak met een geïnspireerd toepassingsidee, het anders doen, innovatief, radicaal of ontwrichtend zijn - wat is uw idee?
Het gebruik van een dubbelarmige robot om assemblagetaken te automatiseren is vrij eenvoudig - laat de robot het werk van een handarbeider kopiëren. Een succesvolle installatie van een SDA dubbelarmige robot begint echter vaak met een geïnspireerd toepassingsidee, dingen anders doen, innovatief, radicaal of ontwrichtend zijn - wat is uw idee?
2D/3D Machine Vision in Robotic Assembly / Demontage
In Assembly neemt Machine Vision vele rollen over - enkele voorbeelden zijn:
- het detecteren van de aanwezigheid van een onderdeel
- het detecteren van de status van een armatuur (leeg, deel geklemd)
- het detecteren van de locatie van onderdelen op een tafel, een dienblad of een transportband, zelfs als ze niet goed zijn uitgelijnd.
- inspectie van onderdeelkenmerken om varianten te identificeren
- inspectie van alle soorten assemblageresultaten (volledigheid, vulniveau)
Machine Vision-camera's kunnen statisch (op een galg boven het object) op de robotarm zelf worden gemonteerd - de robot bestuurt in beide gevallen het machine vision-systeem.
In de afgelopen jaren is Machine vision zeer snel, betrouwbaar, gebruiksvriendelijk en aantrekkelijk geworden in termen van kosten, training en integratie-inspanningen zijn geen showstoppers meer. Ze zouden een flexibeler en efficiënter alternatief kunnen zijn voor een populatie van klassieke nabijheidssensorinstallaties.
Maar als het gaat om meer geavanceerde of geavanceerde vision-toepassingen, vertrouwen we op ons netwerk van professionele Machine Vision-experts. Als robotleverancier zorgen we er gewoon voor dat die vision-systemen naadloos kunnen worden geïntegreerd met onze robotsystemen, waardoor eenvoudige integratie-interfaces zoals VSTART worden geboden. Onze Motoplus C++ SDK Software Development Kit biedt comfortabele API's voor effectieve en snelle ontwikkeling van softwarestuurprogramma's. Maar in veel gevallen hoeven we niet helemaal opnieuw te beginnen. Veel systeemintegrators en leveranciers van machine vision in ons wereldwijde partnernetwerk hebben uitstekende integratie-ervaring met Motoman Robots en we kunnen zelf terugvallen op onze rijke opslagplaats van interface- en softwarestuurprogramma-oplossingen om ervoor te zorgen dat het werkt.
Maar als het gaat om meer geavanceerde of geavanceerde vision-toepassingen, vertrouwen we op ons netwerk van professionele Machine Vision-experts. Als robotleverancier zorgen we er gewoon voor dat die vision-systemen naadloos kunnen worden geïntegreerd met onze robotsystemen, waardoor eenvoudige integratie-interfaces zoals VSTART worden geboden.
Onze Motoplus C++ SDK Software Development Kit biedt comfortabele API's voor effectieve en snelle ontwikkeling van softwarestuurprogramma's, inclusief de brede ROS community. Maar in veel gevallen hoeven we niet helemaal opnieuw te beginnen. Veel systeemintegrators en leveranciers van machine vision in ons wereldwijde partnernetwerk hebben uitstekende integratie-ervaring met Motoman Robots en we kunnen zelf terugvallen op onze rijke opslagplaats van interface- en softwarestuurprogramma-oplossingen om ervoor te zorgen dat het werkt.
Gevoelige montage met behulp van de Servofloat-optie
YASKAWA Servofloat is een geweldige optie om robotbewegingsassen naar de zachte modus te schakelen voor het ondersteunen van verbindingsbewegingen met nauwe toleranties. Dit maakt gevoelige verbindingsbewegingen mogelijk waarbij de pasvormtoleranties relatief krap zijn, of waar de doelpositie niet precies kan worden aangeleerd, zonder de werkstukken te blokkeren. Met de Servofloat-optie kunnen externe krachten (als gevolg van inleidende afschuiningen) verplaats de manipulator omdat de koppelregeling voorrang heeft op de positieregeling.
De gevoelige beweging kan configureerbare enkele assen ("link servofloat") of combinaties van robotassen ("lineaire servofloat") omvatten, zodat de beweging van de assemblagerichting kan worden gedefinieerd in een cirkelvormige of lineaire als een cartesiaanse vector op basis van het robotcoördinatensysteem.
Gevoelige robotassemblage met kracht-/koppelsensoren - Motofit
Wanneer gangbare robotsoftwarefuncties zoals Force Limitation of Servofloat hun limieten bereiken (in termen van procesgevoeligheid, voorkoming van schade aan onderdelen of veiligheid), is krachtdetectie vaak nodig voor insteek- of aanhaalbewerkingen. Een krachtsensor geeft feedback aan het robotbesturingssysteem en kan krachten en koppels meten die op de eindeffector worden uitgeoefend. De YASKAWA MotoFit force control assembly tool verandert de positie van de robot op basis van de kracht die wordt ondervonden om onderdelen uit te lijnen of te assembleren.
Als u de voorkeur geeft aan uw eigen merk kracht/koppelsensor, bieden de YRC1000/FS100-controllers uitstekende standaardsensorcommunicatie-interfaces, bijvoorbeeld snelle digitale en analoge ingangen, geïntegreerd Ethernet en andere veldbusinterfaces. In het geval dat er geen standaardopties beschikbaar zijn, kunnen allerlei sensorstuurprogramma's worden ontwikkeld en geïmplementeerd met behulp van de Motoplus C++ SDK environment.
Gevoelige assemblagebewerkingen met Force Feedback kunnen worden getraind door neurale netwerken.
Robotgrijpers en gereedschapswisselaars
Ons Grijper Netwerk
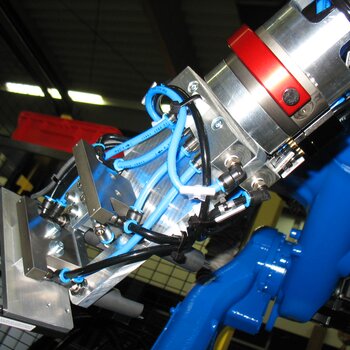
In assemblage, net als in Handling, Pick & Place-toepassingen, is het ontwerp van de grijper cruciaal voor het succes van de toepassing. Het ontwerp van grijpers is een breed veld dat diepgaande expertise vereist. Ook hier werkt YASKAWA samen en ondersteunt het een breed netwerk van grijper- en accessoireleveranciers. We profiteren van hun knowhow en ontwerpen onze hardware- en software-interfaces op een manier die perfecte functionaliteit met onze robots garandeert.
Samen met onze netwerkpartners voor grijpertechnologie, bijvoorbeeld in ons Smart Series Initiative, bieden we Plug and Play-oplossingen die perfect zijn afgestemd op onze robotmodellen.
Flexibele robotgrijperoplossingen
Robotassemblagetaken zijn vaak zeer veelzijdig en vereisen het vastgrijpen van veel verschillende onderdelen of assemblages in verschillende assemblagefasen. Grijpers kunnen worden ontworpen om deze flexibiliteit te dekken, hetzij door complexiteit toe te voegen (grijpers met meerdere vingers) of door de complexiteit te verminderen (grijpers met 2 vingers), de pols van de robot te draaien of door grijpers met meerdere posities te gebruiken. Voor aanpasbare grijpers met geïntegreerde beweging, overweeg dan om de beweging rechtstreeks door de robotcontroller te bedienen als externe servo-assen.
Automatische grijper gereedschapswisselaars
Wanneer de compexiteit van het grijperontwerp zijn grenzen bereikt, werken gereedschapswisselaars altijd. YASKAWA robotcontrollers ondersteunen snelle automatische dockingprocedures met snel herstel van elektrische / veldbus / pneumatische signaaluitwisseling en zijn in staat om een grote bibliotheek met verschillende gereedschappen te beheren.
3D-geprinte grijpers en grijperonderdelen voor Motoman-robots
Overigens wordt de 3D-printtechnologie gebruikt voor robotgrijpers en hun reserveonderdelen (grijpervingers). 3D-printtechnologie maakt een snel compact en lichtgewicht grijperontwerp mogelijk door alle functies, bijvoorbeeld pneumatische voeding, in de grijperbehuizing te integreren. Grijpervingers worden binnen enkele minuten uitgeprint. 3D-printen wordt gebruikt voor het maken van prototypes van grijpers, itererend naar het perfecte grijpvingerontwerp voor een toepassing.